
GTJZ0607 Pjattaforma tal-Operazzjoni tal-Ajru tal-Imqass





I. Ħarsa ġenerali u karatteristiċi tal-prodott
It-trakk ġdid tax-xogħol mill-ajru żviluppat minn XCMG għandu għoli tax-xogħol ta '7.8m, wisa' ta '0.76m, tagħbija ratata ta' 230kg, tul massimu ta 'pjattaforma ta' 2.6m u inklinazzjoni massima ta '25%.Bi struttura kompatta, prestazzjoni avvanzata u apparat ta 'sikurezza komplut, it-trakk huwa adattat b'mod speċjali għall-kostruzzjoni.Barra minn hekk.Huwa ħieles minn kwalunkwe tniġġis, irfigħ u tnaqqis bla xkiel, faċli biex tikkontrolla u tinżamm.Għalhekk, din il-pjattaforma tintuża ħafna f'imħażen, fabbriki, ajruporti u stazzjonijiet tal-ferrovija, speċjalment f'postijiet tax-xogħol dojoq.
[Vantaġġi u karatteristiċi]
●Effective u li tiffranka l-enerġija tas-sistema elettrika-drive karatteristiċi żero emissjoni u ħsejjes baxxi, flimkien mat-tajers mingħajr traċċa, li tippermetti li din il-magna taħdem faċilment f'ambjenti magħluqa bħal bini ta 'uffiċini, sptarijiet u skejjel u jimminimizzaw l-effett fuq l-ambjent.
●Active mekkaniżmu protettiv bħal mekkaniżmu protettiv pothole u s-sistema ta 'kontroll tas-sigurtà żviluppata minnha nnifisha karatteristika d-disinn umanizzat u l-għażliet sinjuri, li jiltaqa' mal-klijent li jeħtieġ sigurtà, affidabilità u intelliġenza.
●Disinn tal-istruttura dejqa jippermetti li l-vettura sħiħa tgħaddi faċilment minn portal wieħed;ċint li jintrewa jista 'jagħmel it-trasport aktar faċli
● "Zero Turning Radius "hija unika u tippermetti magna għal kantuniera f'kamra dejqa.
●Max.tagħbija ta 'tagħbija ta' 230kg, li twassal l-industrija.
●Maximum jivvjaġġaw veloċità 4km/h u 25% gradeability jagħmlu s-sewqan aktar faċli.
II.Introduzzjoni tal-Partijiet Ewlenin
1. Chassis
Konfigurazzjonijiet ewlenin: istering b'żewġ roti, drive 4 × 2, sistema ta 'brejkijiet awtomatiċi, sistema protettiva ta' pothole awtomatika, tajers tal-gomma solida mingħajr traċċa, u rilaxx manwali tal-brejk
(1) Veloċità massima tas-sewqan f'4km/h.
(2) Gradabilità massima f'25%.
(3) Id-denb tax-chassis huwa mgħammar b'toqba standard għat-trasport tal-furketta.
(3) Sistema ta 'protezzjoni tal-fossa awtomatika — tiżgura s-sigurtà għall-irfigħ tal-pjattaforma
(4) Tajers tal-gomma solida mingħajr traċċi - tagħbija għolja, tħaddim stabbli u favur l-ambjent
(5) 4×2 sewqan;ir-roti tad-dawran huma wkoll roti tas-sewqan;tliet gerijiet tal-veloċità tas-sewqan;huwa permess il-mixi ta' kull vjaġġ;
(6) Sistema ta 'brejkijiet awtomatiċi-- il-magna tal-brejkijiet meta tieqaf tivvjaġġa jew tieqaf fuq inklinazzjoni;barra minn hekk, brejk tal-idejn addizzjonali għall-emerġenza;
2. Boom
(1) Ċilindru ta 'luffing wieħed + erba' settijiet ta 'boom tat-tip imqass
(2) Azzar b'saħħa għolja - boom piż ħafif u aktar sigur;
(3) Saħħa imqabbla u riġida - kun żgur li l-isplużjoni hija affidabbli.
(4) Il-qafas tal-ispezzjoni — iżomm l-ispezzjoni sigura
3. Pjattaforma tax-xogħol
(1) Il-pjattaforma prinċipali jista 'jkollha t-tagħbija sa 230kg u s-sotto-pjattaforma għal 115kg.
(2) Tul tal-pjattaforma tax-xogħol × wisa ': 1.88 m × 0.76m;
(3) Is-sotto-pjattaforma tista 'tiġi estiża 0.9m f'direzzjoni waħda
(4) Il-bieb tal-pjattaforma jista 'jsakkar waħdu
(5) Il-guardrail tal-pjattaforma jista 'jintlewa
4. Sistema idrawlika
(1) Komponenti idrawliċi - pompa idrawlika, valv prinċipali, mutur idrawliku u brejk huma kollha magħmula minn manifatturi famużi domestiċi (jew internazzjonali).
(2) Is-sistema idrawlika hija misjuqa minn pompa tal-irkaptu mmexxija bil-mutur, u b'hekk tirrealizza l-irfigħ u t-tnaqqis tal-pjattaforma u t-tħaddim u l-isteering tal-pjattaforma.
(3) Iċ-ċilindru ta 'l-irfigħ huwa mgħammar b'valv ta' dixxendenza ta 'emerġenza - biex jiżgura li l-pjattaforma tista' tinżel għal retrazzjoni b'veloċità stabbli anke f'każ ta 'inċident jew nuqqas ta' enerġija.
(4) Iċ-ċilindru ta 'l-irfigħ huwa mgħammar b'lock idrawliku biex jiżgura li l-pjattaforma tax-xogħol tista' żżomm l-għoli b'mod affidabbli wara li l-pajp idrawliku jinkiser.
5. Sistema elettrika
(1) Is-sistema elettrika tadotta teknoloġija ta 'kontroll tal-linja CAN.Ix-chassis huwa mgħammar b'kontrollur u l-pjattaforma hija mgħammra b'manku ta 'kontroll.Il-komunikazzjoni bejn ix-chassis u l-kontrollur tal-pjattaforma hija realizzata permezz tal-linja CAN, sabiex tikkontrolla l-azzjoni tal-magna.
(2) It-teknoloġija ta 'kontroll proporzjonali tagħmel kull azzjoni stabbli.
(3) Is-sistema elettrika tikkontrolla l-movimenti kollha, inkluż l-istering tax-xellug / tal-lemin, l-ivvjaġġar ta 'quddiem / ta' wara, swiċċjar b'veloċità għolja / baxxa u rfigħ tal-pjattaforma tax-xogħol.
(4) Metodi multipli ta 'sigurtà u twissija: protezzjoni tal-inklinazzjoni;interlock tal-manku;protezzjoni awtomatika tal-ħofra;protezzjoni awtomatika b'veloċità baxxa f'altitudni għolja;pawża ta’ niżla ta’ tliet sekondi;sistema ta 'twissija ta' tagħbija tqila (mhux obbligatorja);sistema ta 'protezzjoni ta' ħlas;buttuna ta' emerġenza;buzzer ta 'azzjoni, dawl li jteptep inverter, ħorn, tajmer u sistema ta' dijanjosi tal-ħsarat.
III.Konfigurazzjoni ta 'Elementi Ewlenin
| S/N | Komponent ewlieni | Kwantità | Brand | Nota |
| 1 | Kontrollur | 1 | Hirschmann/Wied tat-Tramuntana | |
| 2 | Pompa prinċipali | 1 | Sant/Bucher | |
| 3 | Mutur idrawliku | 2 | Danfoss | |
| 4 | Brejk idrawliku | 2 | Danfoss | |
| 5 | Unità tal-qawwa | 1 | Bucher/GERI | |
| 6 | Ċilindru ta' derricking | 1 | XCMG Dipartiment idrawliku / Dacheng / Shengbang / Diaojiang | |
| 7 | Ċilindru tal-istering | 1 | ||
| 8 | Batterija | 4 | Trojan/Leoch | |
| 9 | Ċarġer tal | 1 | GPD | |
| 10 | Swiċċ tal-limitu | 2 | Honeywell/CNTD | |
| 11 | Swiċċ tal-ittestjar | 2 | Honeywell/CNTD | |
| 12 | Drive bil-mutur | 1 | Curtis | |
| 13 | Tajer | 4 | Exmile/Topower | |
| 14 | Senser tal-angolu | 1 | Honeywell | Fakultattiv |
| 15 | Sensor tal-pressjoni | 1 | danfoss | Fakultattiv |
IV.Tabella tal-Parametri Tekniċi Ewlenin
| Oġġett | Unità | Parametru | Tolleranza permissibbli | ||
| Dimensjoni tal-magna | Tul (mingħajr sellum) | mm | 1882 (1665) | ±0.5% | |
| Wisa' | mm | 760 | |||
| Għoli (pjattaforma mitwija) | mm | 2148(1770) | |||
| Base tar-roti | mm | 1360 | ±0.5 % | ||
| Binarju tar-rota | mm | 660 | ±0.5 % | ||
| Distanza minima mill-art (protettur tal-ħofra axxendenti/inżul) | mm | 60/20 | ±5 % | ||
| Dimensjoni tal-pjattaforma tax-xogħol | Tul | mm | 1655 | ±0.5 % | |
| Wisa' | mm | 740 | |||
| Għoli | mm | 1226 | |||
| Tul ta 'estensjoni tal-pjattaforma awżiljarja | mm | 900 | |||
| Pożizzjoni taċ-ċentru tal-magna | Distanza orizzontali għax-xaft ta' quddiem | mm | 750 | ±0.5 % | |
| Għoli taċ-ċentru ta' ċentru | mm | 570 | |||
| Massa totali tal-magna | kg | 1520 | ±3% | ||
| Max.għoli tal-pjattaforma | m | 5.8 | ±1 % | ||
| Min.għoli tal-pjattaforma | m | 1.01 | ±1 % | ||
| Għoli massimu tax-xogħol | m | 7.8 | ±1 % | ||
| Raġġ ta' tidwir minimu (rota ta' ġewwa/rota ta' barra) | m | 0/1.75 | ±1 % | ||
| Tagħbija ratata tal-pjattaforma tax-xogħol | kg | 230 | — | ||
| Pjattaforma tat-tagħbija wara x-xogħol estiża | kg | 115 | — | ||
| Ħin tal-irfigħ tal-pjattaforma tax-xogħol | s | 15-30 | — | ||
| Tnaqqis tal-ħin tal-pjattaforma tax-xogħol | s | 22-35 | — | ||
| Max.veloċità tal-ġiri f'pożizzjoni baxxa. | km/h | ≥4 | — | ||
| Max.veloċità tal-ivvjaġġar f'altitudni għolja | km/h | ≥0.8 | — | ||
| Gradabilità massima | % | 25 | — | ||
| Angolu ta' twissija tal-inklinazzjoni (ġenb/quddiem u lura) | ° | 1.5/3 | |||
| Mutur ta 'rfigħ / tħaddim | Mudell | — | — | — | |
| Qawwa nominali | kW | 3.3 | — | ||
| Manifattur | — | — | — | ||
| Batterija | Mudell | — | T105/DT106 | — | |
| vultaġġ | v | 24 | — | ||
| Kapaċità | Ah | 225 | — | ||
| Manifattur | — | Trojan/Leoch | — | ||
| Mudelli tat-tajers | — | Bla traċċa u solidu / 305 × 100 | — | ||
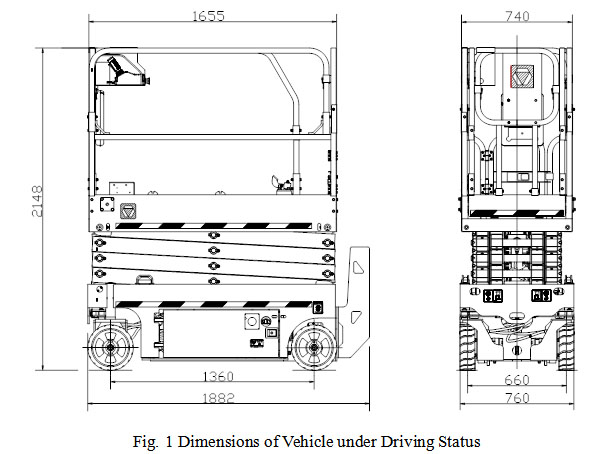
V. Dijagramma Dimensjonali ta' Vettura fi Stat ta' Miexi
Sekwestru: konfigurazzjonijiet fakultattivi
(1) Sistema ta 'twissija ta' tagħbija
(2) Fanal tax-xogħol tal-pjattaforma
(3) Imqabbad mal-pajp ta 'l-arja tal-pjattaforma tax-xogħol
(4) Imqabbad mal-provvista tal-enerġija AC tal-pjattaforma tax-xogħol



